Beautiful Work Info About How To Control A Digital Servo

Hobby Servo Tutorial - Learn.sparkfun.com
Ds760 Titanium Gear Ultra Speed Digital Servo Motors Mks | Jsumo.com

Hiwonder Ld-27mg Full Metal Gear Digital Servo With 270 Control Angle,


Cute - Elet Electronics Digital Servo Control Cards

A servo motor is controlled by sending a series of pulses through the signal line.
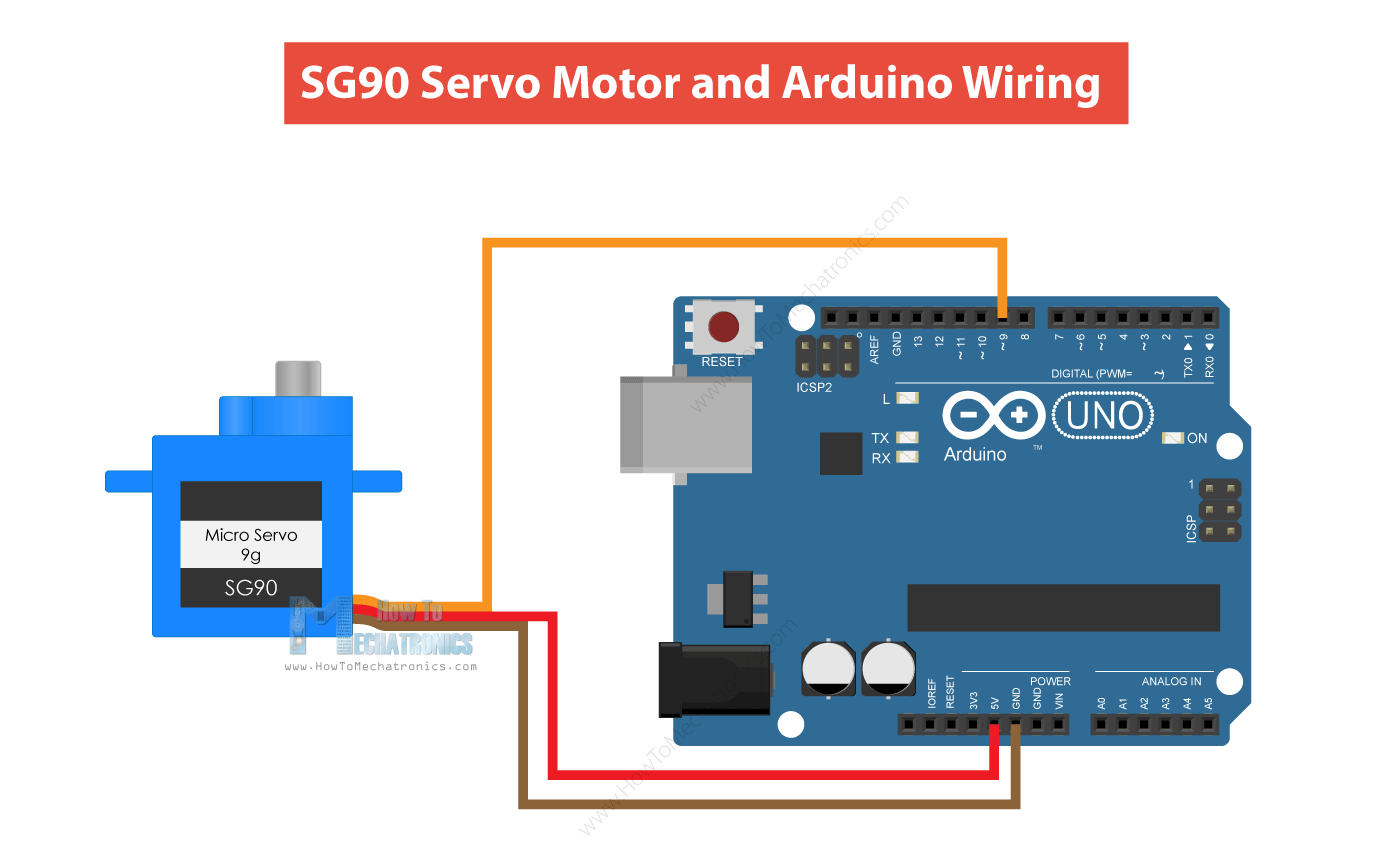
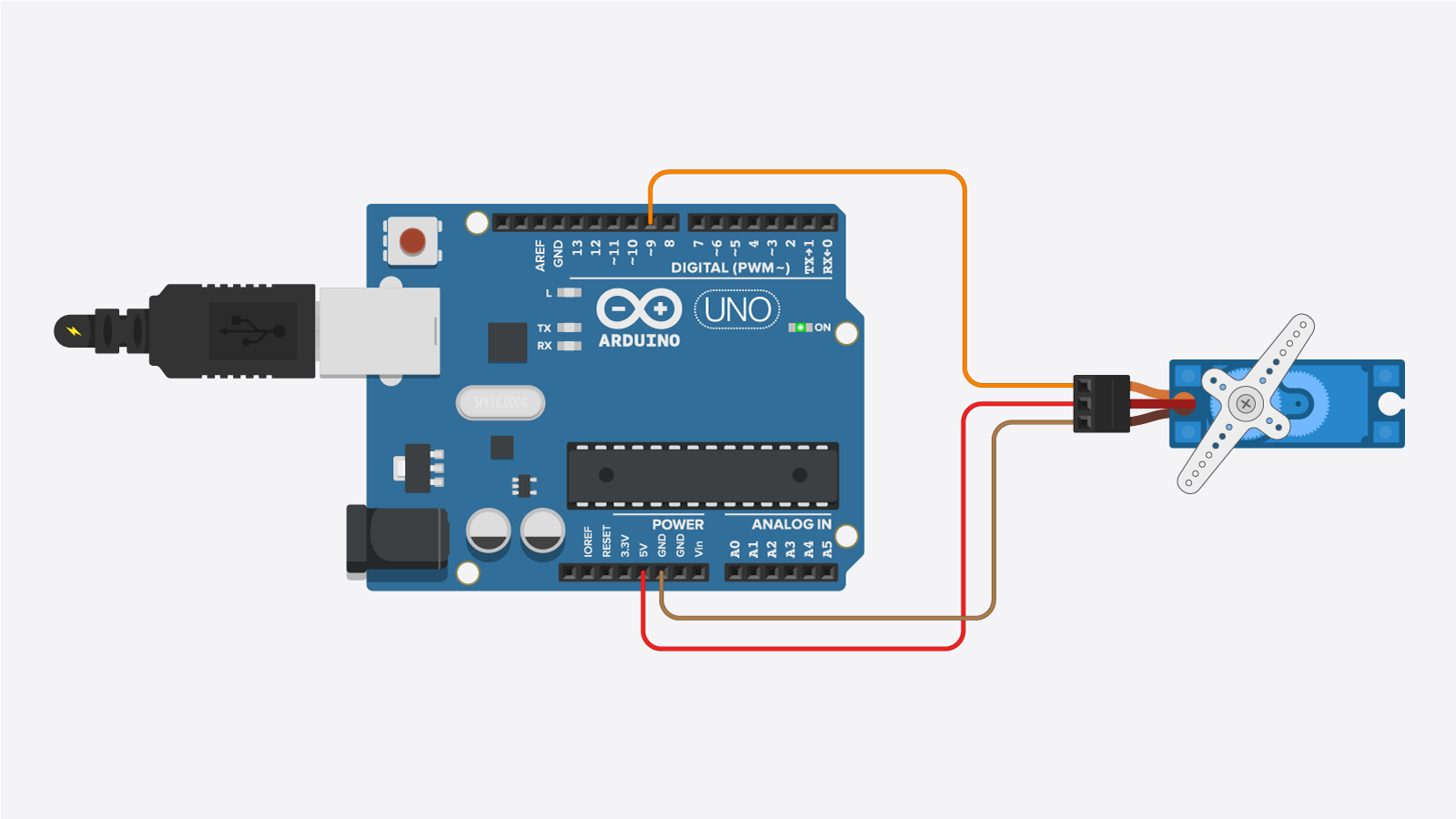
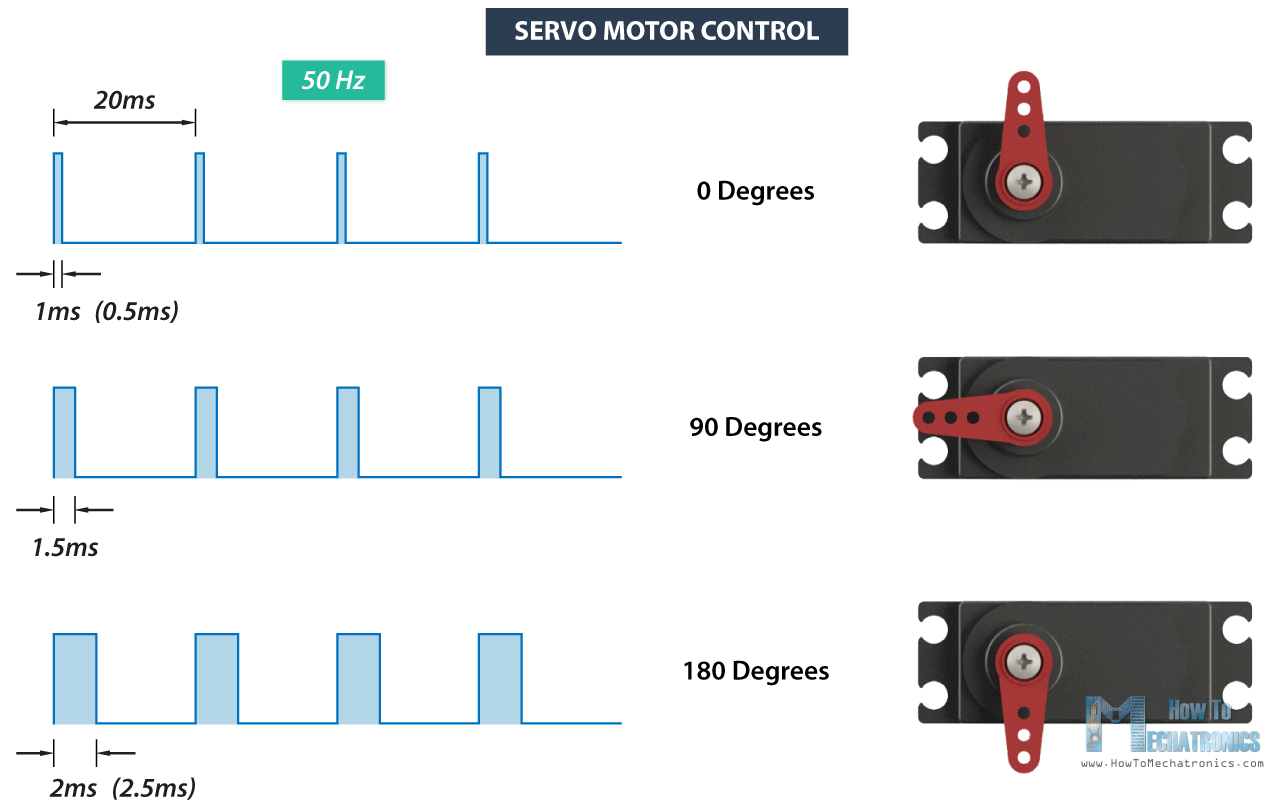
How to control a digital servo. The frequency of the control signal should be 50hz or a pulse should occur every 20ms. // r/c servo connected to digital pin int myangle; In this tutorial we will learn how servo motors work and how to control servos using arduino and pca9685 pwm driver.find more on my website!
// function variable void servopulse(int. This servo can turn 200degree or 220degree, didn't measure, but definitely more than 180degree. Some can rotate up to 360 degrees.
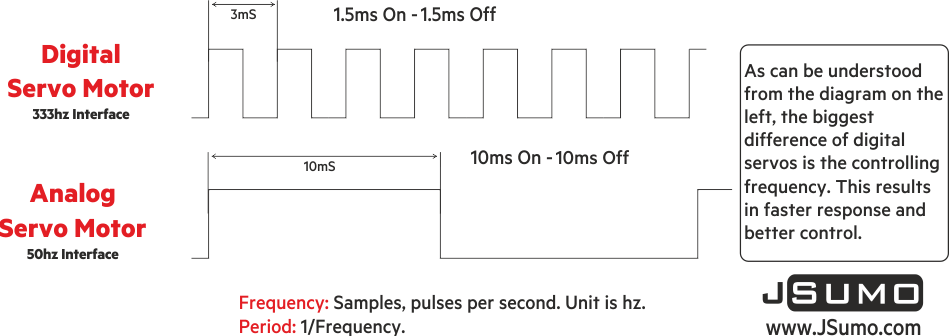
//define a variable for the channel of the receiver with which you want to control the servos, in this case channel2 (ailerons channel from my receiver) int. Velocity mode tuning is pretty simple. When the pulse duration is 1.5ms, the servo is in ‘middle’ position.
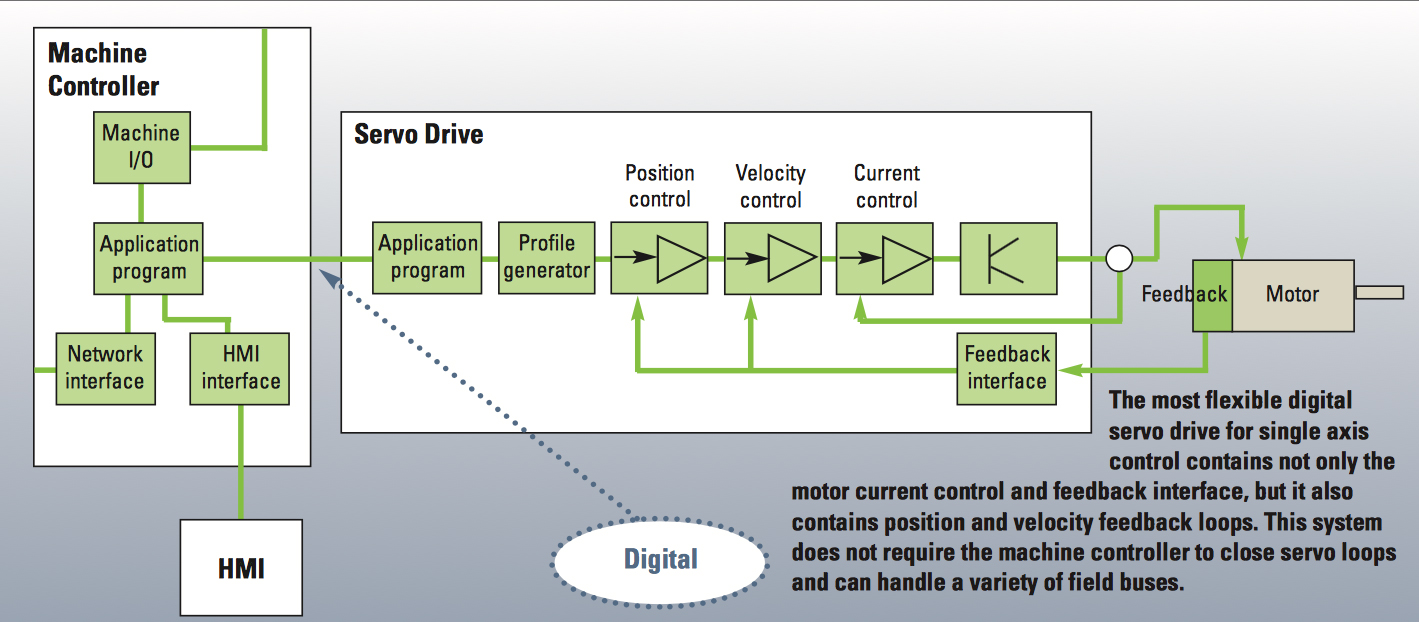
Since the servo controller is digital, you can perform the design in the discrete domain. If your drive is in current mode then you should skip this step. In general, this servo motor can rotate from 0 degrees to 180 degrees.
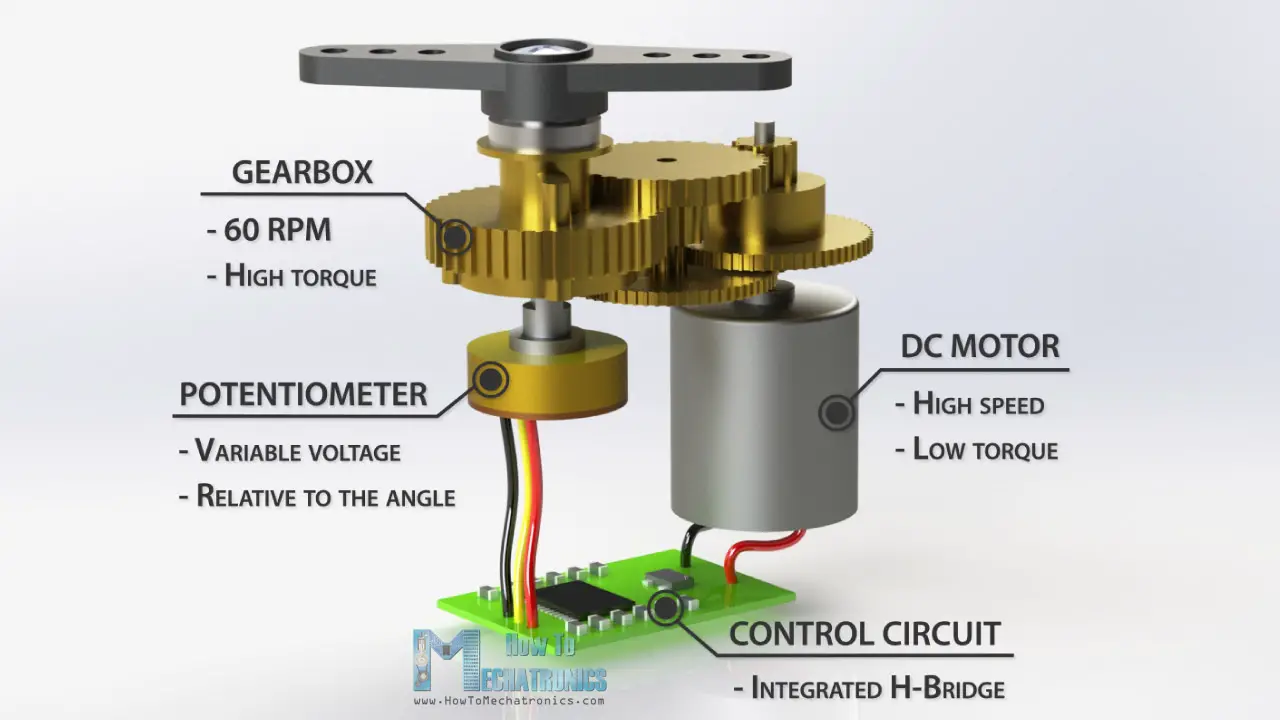
If your drive will be operating in velocity mode, then you'll need to tune the velocity loop. The difference between digital and analog servo is analog servo is controlled by custom logic chip and digital servo is controlled by micro controllers. Set and adjust the intelligent control servo system with fs (pwm.
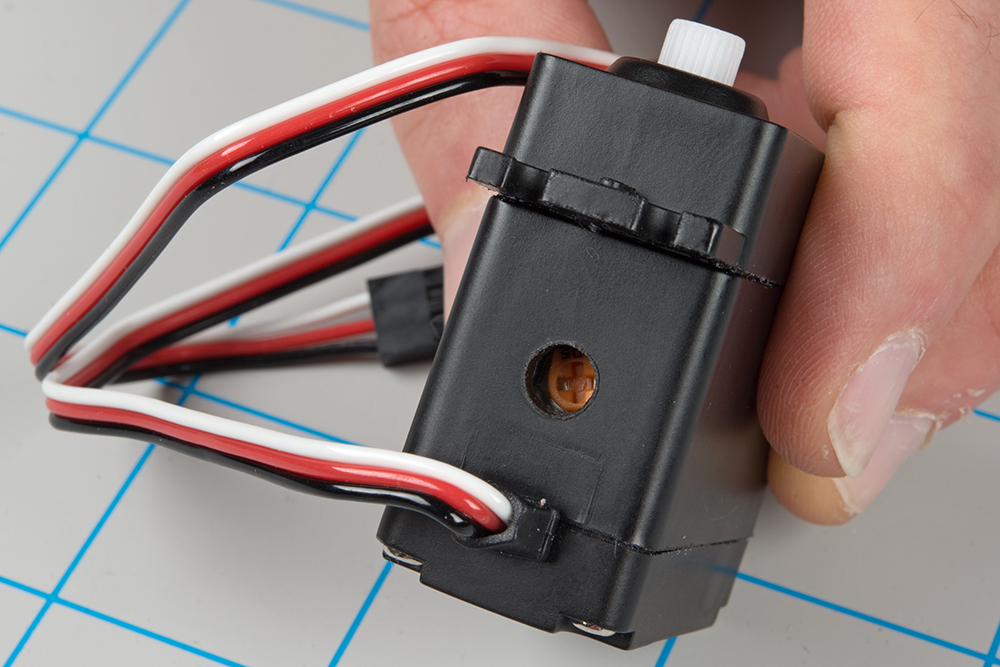
Servo is a motor that can be controlled to rotate to a certain level. If a 1ms pulse is applied, the servo moves all the way to left while a 2ms pulse will make the servo move all the. We will control a hobby servo using an arduino (avr) microcontroller by outputting a pwm (pulse width modulation) signal from the microcontroller to the servo.
A servo controller will normally be a dedicated piece of hardware that can take inputs from other components like a joystick, potentiometer or sensor feedback to set the. We will be using much of the.
How To Control Servo Motors With Arduino - Complete Guide
Where Are Digital Servo Drives Used?
How To Control Servo Motors With Arduino (3 Examples)
Hobby Servo Tutorial - Learn.sparkfun.com

Hiwonder Ld-27mg Full Metal Gear Digital Servo With 270 Control Angle,
How To Control Servo Motors With Arduino - Complete Guide
How To Control Servo Motors With Arduino - Complete Guide
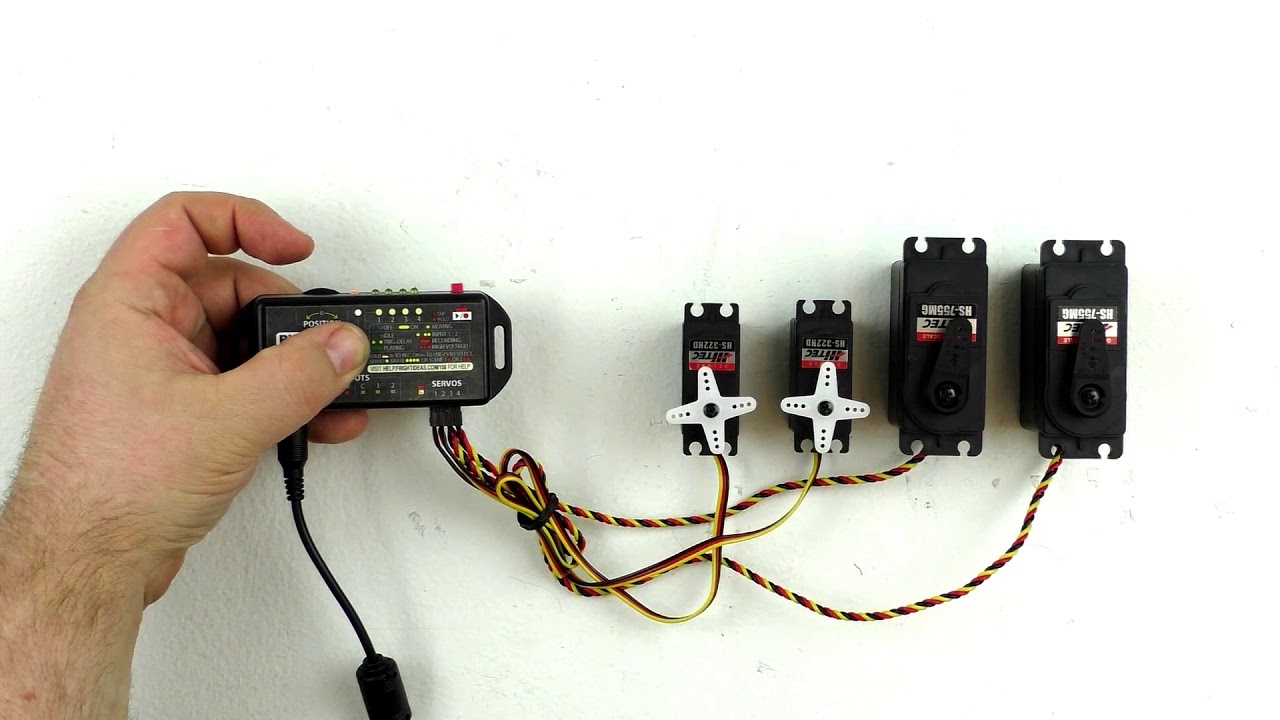
Easy Servo Control - How To Servos Using A Picoservo Controller Youtube

Td-8120mg Digital Servo 20kg

Annimos Digital Servo High Torque Full Metal Gear Waterproof Rc Control Toys | Ebay



